University of Nebraska-Lincoln Application Story
Researchers at the University of Nebraska-Lincoln developed an agricultural robotic system to eliminate harmful weeds that interfere with crop growth, designed to support sustainable farming practices. The system features a smart rotary tiller mechanism that detects weeds in real time and mechanically extracts them without damaging the surrounding soil.
.png?width=1100&height=619&name=Blog%20Feature%20Images%20(12).png)
Figure 1. See-N-Till agricultural robot.
The system, named See-N-Till (shown in Figure 1), provides an environmentally responsible alternative to weed control, removing the need for chemical herbicides and minimizing soil disruption. To achieve the necessary level of speed, precision, and reliability, Iris Dynamics’ ORCA Series Smart Linear Motor was chosen for actuation. Its high force output, rapid response, and rugged design made it an ideal choice for powering the See-N-Till’s actuation system in demanding field conditions.
|
Objective |
Iris Dynamics Solution |
Outcome |
|
Develop a high-speed, precise robotic tilling system capable of detecting and mechanically removing weeds in real time without damaging surrounding crops or soil. |
ORCA-15-48V smart linear motor with fast response, high force output, onboard precise position control, and no compromise on payload. |
Enabled fast, precise weed extraction with minimal soil disturbance, reducing reliance on chemical herbicides while improving system responsiveness and reliability. |



Definitions
| Force Limiter | A configurable control feature that restricts the maximum force an actuator can exert, ensuring safe operation and protecting surrounding equipment and materials. |
| Haptics Mode | Haptics Mode combines position, velocity, and force to model physical behaviours such as spring simulations, oscillations, damping, inertia, and more. |
| Kinematics Mode | Kinematics Mode is the simplest way to achieve smooth point-to-point position control, useful when a user wants to smoothly move the motor between position targets. |
| P-Gain | Adjustable control parameter that responds proportional to the current position following error. |
| Rack and Pinion Mechanism | A linear drive in which a set of teeth placed along a long axis are driven by a rotary motor with a round gear. |
| Rotary Tiller Mechanism | The mechanical assembly responsible for engaging and extracting weeds from the soil. It operates in coordination with the ORCA actuator for precise depth control. |
| See-N-Till | The agricultural robotic system developed by the University of Nebraska-Lincoln that detects and mechanically removes weeds from soil in real time using an automated rotary tiller. |
The Challenge: Engineering a Smart Tilling System for Precise, Low-Impact Weed Removal
Researchers set out to develop a robotic solution that could independently identify and remove weeds in real time without relying on chemical treatments. The project involves designing a mechanical system capable of detecting weeds in milliseconds, engaging only when needed, and mechanically extracting them from the soil so they cannot regrow. Achieving this required a high-speed, high-force actuation system that could quickly raise and lower a rotary tiller mechanism with precision and reliability. The primary challenge was reducing the time between detection and actuation while ensuring the system could withstand outdoor field conditions such as heat, moisture, and rough terrain.
ORCA-15-48 Linear Actuator as an Ideal Solution
Smart, High-Force, Low-Latency, Linear Motor Engineered for Harsh Field Environments
The research team required a linear actuator capable of outputting high forces, supporting high payloads, and controlling position precisely, without compromising on speed. Detection of the See-N-Till mechanism happens very fast, within sub-milliseconds, where the actuation is the part of this system requiring the most time. It was important in this project to minimize the amount of time between detection and actuation of the system. The actuator needs to respond instantly to the detection, lowering and raising the tilling mechanism in fast succession while maintaining accuracy and stability in outdoor field conditions. ORCA motor’s fully-integrated design achieves this rapid response time, with low latency and high rates of communication between internal sensors, drivers, and controllers. The motor’s closed-loop architecture (shown in Figure 2) enables real-time sensing and control, with sub-millisecond response times. In traditional linear actuators, sensors and controllers are external to the motor, which adds latency to the control loop and reduces overall accuracy and stability. By integrating these components internally, the ORCA provides continuous, low-latency feedback that improves both precision and performance.
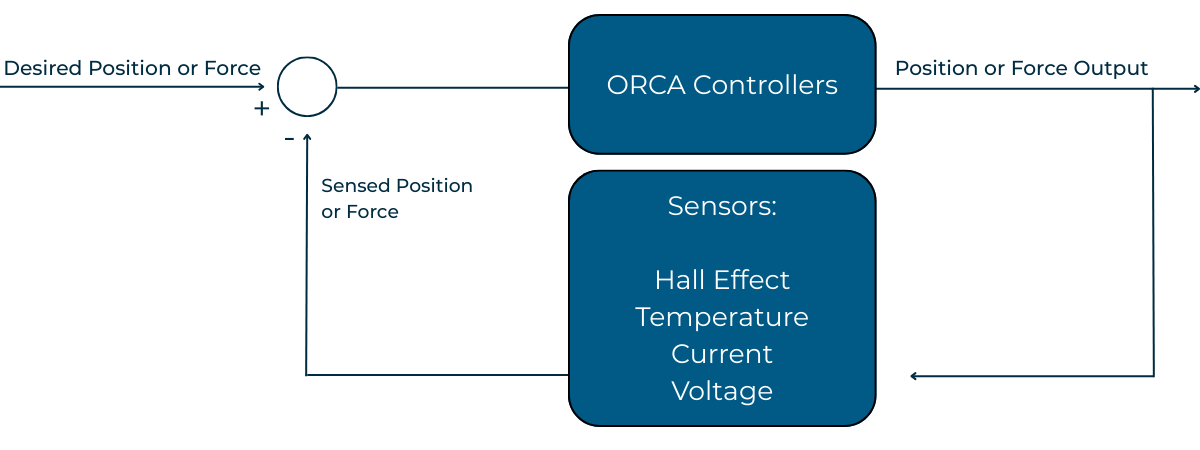
Figure 2. The ORCA Motors' closed-loop architecture.
The team evaluated numerous options, including a rack and pinion system, but identified that force outputs, speed, positional accuracy in a compact and rugged system was best met by the ORCA Series Smart Linear Motors. The ORCA-15-48V was selected for its high force outputs, paired with the IO SmartHub for ease of integration. Once the See-N-Till identifies the weed, the IO SmartHub receives a digital trigger from the PLC, telling the ORCA motor to lower the tiller to the ground and grind the soil.
The ORCA motor’s rugged design delivered reliability during all weather conditions whether it be direct sun, rain, and high-field temperatures. With one single moving part, being the stainless steel shaft, all auxiliary components (position and force sensing, motor driver, and controller) are fully epoxy potted in the motor’s chassis providing a compact, IP68+ rated actuation system. Smart actuation and real-time force feedback allowed the tiller system to only apply forces necessary for extraction, minimizing disturbance to the soil and surrounding crops and avoiding unnecessary wear on the mechanism. This level of precision allowed the system to target the root zone of weeds, extracting material from deeper within the soil to prevent regrowth while maintaining the integrity of the surrounding soil structure. The motor’s high payload capacity allowed it to manage the weight of the tiller assembly, while its positional resolution provided accurate control over the depth and throw of each engagement. This was critical for determining how deeply the tiller should penetrate dense soil, as excessive motion could place too much stress on the See-N-Till system.
Technical Specifications
| Environmental Protection | IP68+ rated housing, suitable for operation in field conditions with direct sun, rain, and temperatures ranging from 80–110 °F. |
| Force Output | Continuous output up to 87 lbs with cooling (35 lbs without). |
| Fully-Integrated Architecture | Direct-drive, cogless design with one moving part (stainless steel shaft). All auxiliary components are epoxy-potted within the chassis for reliability and durability. |
| High Speed | Maximum linear speed of 60 inches per second, allowing rapid actuation between detection and tilling engagement. |
| Low Latency | On-board advanced microprocessors and integrated sensing allow for sub-millisecond control loop times, minimizing communication delays between sensors, drivers, and controllers for near-instant system response. |
| Payload Capacity | Supports 120 lbs tiller assembly while maintaining speed and accuracy. |
| Position and Force Resolution | High positional resolution allows precise control of till depth and throw. Force feedback ensures the system applies only the pressure needed for extraction. |
Integration
The ORCA-15-48V actuator was mounted on the See-N-Till system at an angle opposite the rotary tiller to provide efficient motion transfer and precise control (shown in Figure 3). The motor assembly was installed using the rear tube configuration, which offered a compact and enclosed design that minimized potential safety hazards to surrounding sensors and electronics. Once integrated, the ORCA motor and tiller assembly operated as a single coordinated mechanism capable of rapid engagement and retraction during weed extraction.
.png?width=1280&height=720&name=Blog%20Feature%20Images%20(13).png)
Figure 3. The ORCA-15-48V integration into the See-N-Till agricultural robot.
The IO SmartHub served as the communication bridge between the See-N-Till’s programmable logic controller and the ORCA actuator, allowing real-time exchange of position and force data to synchronize weed detection with mechanical response. The team operated the actuator in both Kinematics and Haptics Modes, taking advantage of the motor’s ability to combine precise motion control with active force feedback. Through adjusting the P-gain and the use of force limiters, they optimized motion speed and responsiveness while ensuring safe engagement with the soil. These adjustments allowed the tiller to apply only the force needed for extraction, protecting both the mechanism and surrounding crops. The result was a compact, fully integrated actuation system that reduced workflow time, improved control accuracy, and provided consistent performance during field testing.
Advancing Sustainable Farming Practices
The See-N-Till system demonstrates how advanced actuation and control technologies can be applied to create more efficient and sustainable farming practices. We are not bound to traditional farming with chemicals and herbicides. By combining intelligent weed detection with precise mechanical extraction, the system offers a practical path toward reducing chemical herbicide use while maintaining productivity and soil quality. As automation continues to evolve within agriculture, the integration of high-performance smart actuators position research teams to develop the next generation of responsive and environmentally conscious farming equipment.