Introduction
Haptics is a term referring to the creation of a sense of touch through the application of forces, vibration and motion to a user. As ORCA Series linear motors are inherently force controlled they are the perfect candidate for use in haptic force feedback application. They have always had built in force and position controllers. The kinematic controller adds a layer of control to the position control to generate motion profiles given position targets and travel times. In comparison to the kinematic controller, the haptic controller meanwhile makes use of the force feedback and physics models to have the motor simulate real-world interactions and generate tactical sensations through force feedback.
Significance
Developing human interaction for entertainment, training applications, or remote operation of devices all require a realistic recreation of a simulated environment. The haptic controller not only allows for human machine interaction, it also provides a way of having the motor simulate its own virtual environment. For example it can provide itself with virtual dead stops, simulate travel through viscous fluid, or change its inertia mass among other possibilities.
In order to achieve haptic sensation a force update rate of ~1000 Hz is generally regarded as being realistic. Stability of effects is greater the faster the loop rate, this allows for stronger effects and faster vibrations.
Putting the haptic controller calculations within the motor’s internal controller removes the need for external controllers that require an additional layer of communication to command force feedback effects to the motor. Cutting this communication out increases the force update loop to the motor’s internal ~3000 Hz force command loop.
Force Feedback Effects
The haptic controller provides a wide range of effect types that can be combined, and adjusted independently. Multiple motors can be used in combination to provide effects in multiple degrees of freedom due to the motor’s compliant nature. This provides a powerful tool set for creating a nuanced experience, and precise control. All effects can also be used with negative coefficients, for example a negative spring effect would instead apply a force away from the equilibrium position rather than towards it.
Constant Force
The simplest of effects available is the constant force effect.
Constant force can be used to add offset to other effects, to simulate friction, act to cancel the effect of gravity on a load, or maintain contact with an object. It also allows an interface to stream in user-defined forces on top of the other effects.
Spring
Multiple spring effects are available that can be used ranging from creating a weak centering force, to creating virtual walls.
F = -kx
At its core the spring effect makes use of Hooke's Law equation for ideal springs, where the force is proportional to the distance from an equilibrium position. However, the effect also allows for customization including adding dead zones, saturation values, and bi or unidirectional configuration.
Damper
The damping effect can be thought of as a braking force, or the feeling of traveling through viscous fluid.
F = -pv
The resulting force is proportional to the velocity of the motor.
Inertia
Inertia describes a body’s resistance to changes in motion (or lack of motion). Newton’s second law of motion describes the changes that a force can produce on a body.
F = ma
The inertia effect allows simulation of a change to the inertial mass of the motor. Negative inertial effects are also possible, allowing for creating the sense of weightlessness.
Oscillations
Multiple oscillators are available to provide periodic force effects with a variety of wave-forms including square/ PWM, sine, triangle, and saw-tooth.
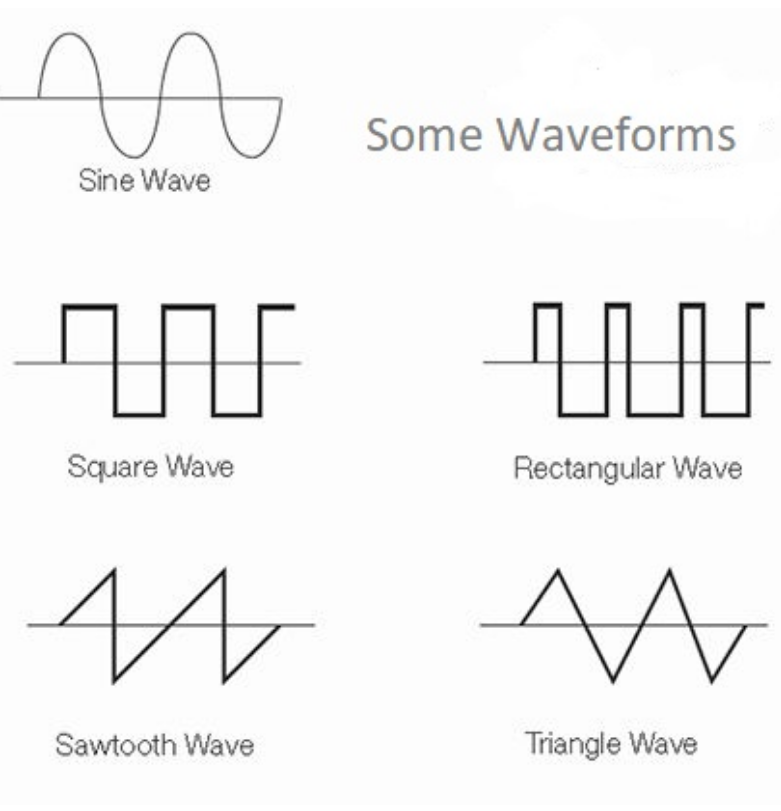
Frequencies can be set as low as 0.1 Hz to greater than 1000 Hz. This allows for simulation or cancellation of vibrations, up to creating musical notes. Multiple oscillators can be combined to create unique vibration patterns, such as the vibrations in a helicopter, or the feeling of a gravel road.
Using the Haptic Controller
Setting up an ORCA Series motor to perform custom haptic force feedback effects is made easy with the IrisControls companion application. Connecting to an ORCA Series motor with a USB cable gives access to a full graphical user interface that includes a haptic controller configuration page.

All effects can also be adjusted or triggered through serial MODBUS messages streams. This feature enables users to adjust all effects in real-time, allow for effect modifications based on simulated environments or through feedback from real-world systems or sensor input.
Constant force, spring, damper, inertia, and oscillation. All layer-able and available in the ORCA's haptic mode, and haptic is just one of the 4 modes that the ORCA can operate in.
Interested and want to hear more? Contact us at the link below.