When a person experiences Virtual Reality they are allowed to move around in a simulated environment. They can stick their head out of a window to see the hanging load underneath a helicopter or swivel their head around to look around. This works because the VR Headset detects motion and reports to the simulated environment how the user is moving around, so the simulation can render the resulting visuals to the user.
The use of Stewart Platforms enhances the Virtual Reality experience, and can help combat VR motion sickness. The motion cues given from a platform relieve the disconnect that riders feel when the eye experiences motion but the inner ear doesn’t. When this occurs, our brains believe they’ve been poisoned resulting in nausea. Using real motion, the inner ear experiences the same reality presented to the eye. The Stewart Platform, therefore, moves a rider around to satisfy their inner ear. A problem arises, however, because the VR Headset can’t discern which motions it experiences are due to the rider moving their head or the motions of the platform itself.
To illustrate, consider two situations: a VR rider in a helicopter first corrects their posture by sitting up straighter, and then that same VR rider lifts off in their virtual helicopter. When the rider corrects their posture, the VR headset measures the upward motion, and the rider experiences moving up in the cockpit, they see a bit more over the dash. Next, the pilot lifts off, and the Stewart Platform starts to rise. Again, the VR headset measures upward motion, but this time the pilot experiencing upward motion in the cockpit is undesired. It would be very confusing for the pilot if their head lifted up through the roof of the cockpit every time they lifted off, or shot out the side of their car when they went around a corner. Stewart Platforms motions must therefore be cancelled from the motion measured by the VR headset leaving only the rider’s motions to be rendered.
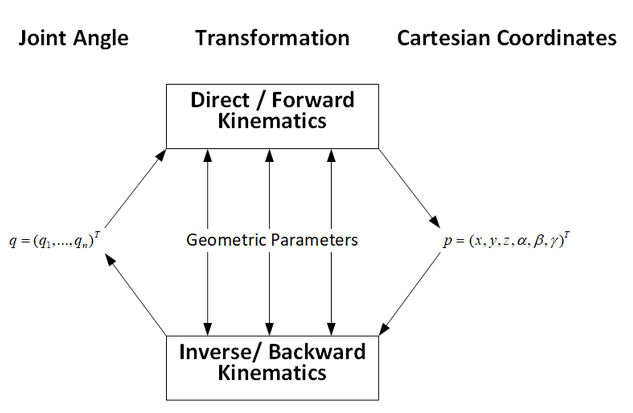
Forward Kinematics are critical to accomplishing this task. The actuator positions, which are typically measured very accurately, are used to quickly calculate platform motion, which can then be deleted from the measured headset motion. Sometimes external sensors like accelerometers are placed on a platform and used to aid in motion deletion. A Forward Kinematic model not only replaces these sensors, but when done correctly can also do it with improved latency, vibration resistance, and consistency.
Iris Dynamics’ Raven-6DoF Motion Platform Development Kit features FPGA powered FKM and IKM calculations which offer industry leading latency making it ideal for VR applications. The Raven-6DoF Kit can be used to built motion platforms with 6 degrees of freedom in geometries to suit any application. Learn more about Raven-6DoF here.
 However, because this is a set of circular functions feeding back into each other, errors compound and eventually result in the system being entirely disconnected from the reality of the situation.
However, because this is a set of circular functions feeding back into each other, errors compound and eventually result in the system being entirely disconnected from the reality of the situation.