Latency measures the delay present between two events in a system [1]. Real-time responses are an aspect of real-time systems, which occur following an event or input to the system within a defined period of microseconds to milliseconds. Multiple factors contribute to latency in actuation systems, such as the sampling rate, filtering requirements, and the speed of data transmission. Low-latency is especially important in the context of linear motors, as it provides a precise responsive output in the absence of rigid mechanical systems.

Fast, predictable, and consistent system response is essential in modern applications such as robotics, automation, simulation, and human-machine interfaces. Latency, the delay between an input and the system’s response, can impact safety, performance, and user experience. Reducing this delay is critical in achieving high-precision control and reliable operation. Real-time systems are designed to respond within strict time limits, often measured in microseconds or milliseconds. These systems depend on a feedback loop that includes sensors, communication channels, processors, and actuators. Among these, actuation is the final step, and its speed and consistency directly affect the overall system's performance.
ORCA motors are engineered to meet the demands of real-time actuation. Its architecture uses bare-metal firmware, streamlined hardware, and minimal signal filtering to reduce overhead and increase responsiveness. This whitepaper explores the factors that contribute to latency and highlights how ORCA motors are engineered to minimize delay across the entire control loop. The result is a system capable of precise, consistent, and low-latency performance for a wide range of real-world applications.
Definitions
Latency: Measures the delay present in a system, from a command to the system’s response [1]. Low-latency refers to a delay with minimal duration, with the duration which qualifies being somewhat dependent on the use case, as the term is used in a number of contexts including networking, audio, hardware, and software [2]. Low-latency in this context, refers to system response times measured in a number of microseconds.
Real-Time Response: Occur following an event or input to the system, within a defined period of microseconds to milliseconds. Real-time responses are an aspect of real-time systems, which interact with the environment through devices such as sensors and actuators [3].
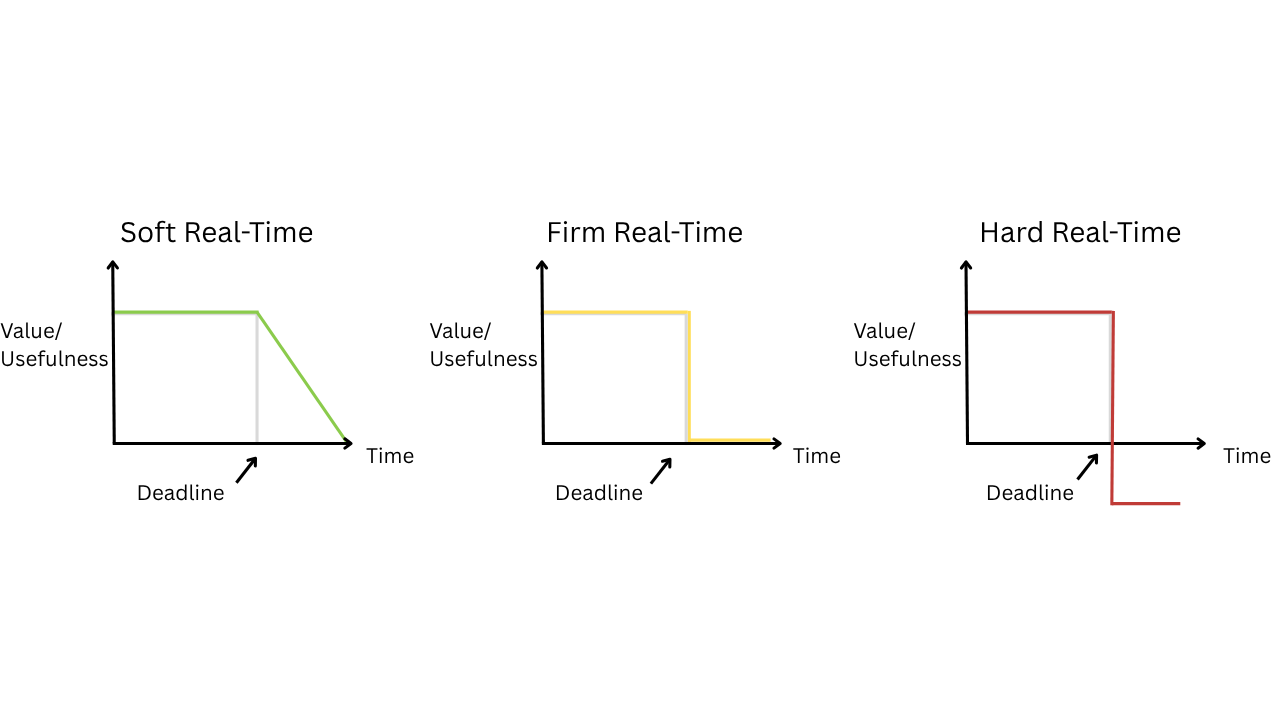
Real-Time Systems: They can be subdivided into broader categories of hard, firm, and soft. These categories are based on the system’s tolerance for delay [4]. In a hard real-time system, the timing of a response is as essential as its correctness, with a late response having the same consequences as an incorrect response [3]. A pacemaker is an example of a hard real-time system [5]. Firm real-time systems will continue to operate if delayed information is provided, but the delayed data may not be useful [5]. In a soft real-time system delayed output is considered to be of lower quality [5].
Fig. 1. Types of real-time systems [6].
Major Contributions to Latency in Actuation Systems
There are multiple factors that contribute to latency in actuation systems. The sampling rate, or sampling frequency, of a system’s sensors influences how quickly changes in the external environment are recorded.
Latency in actuation systems arises from several tightly coupled components within the sensing, communication, and processing pipeline. Understanding these contributors is critical when designing systems that require fast, deterministic response to dynamic environments. The primary sources of latency include:
1. Sensor Sampling Rate
The sampling rate (or sampling frequency) determines how often a sensor measures a physical quantity. Higher sampling rates can detect changes in the environment more quickly, allowing for faster control loop responses. However, increasing the sampling rate also has trade-offs:
- It can lead to greater computational load on the processor.
- It may introduce higher levels of quantization noise or aliasing if not paired with appropriate filtering [7].
- Excessively high rates can result in redundant data with diminishing returns in system performance.
2. Sensor Bandwidth and Filtering
Sensors are often subjected to filtering to reduce noise and improve signal stability, but these filters can introduce additional phase delay or group delay. Latency is affected by a system’s filtering requirements, which can constrain sensor bandwidth [8]. This effectively reduces the usable bandwidth of the sensor and slows down the system’s ability to react to rapid changes. For example, aggressive low-pass filtering may smooth out high-frequency noise but at the cost of suppressing genuine fast system dynamics.
3. Communication Latency
The baud rate, or speed of data transmission in bits per second, influences how quickly data is sent and received, which has an impact on its latency [2]. Lower baud rates or inefficient communication protocols can add significant delays, particularly in systems where multiple signals are multiplexed or where packets must be verified and resent due to errors. Latency in wired or wireless links (e.g., CAN, UART, SPI, or wireless protocols like BLE) is especially critical in distributed control systems.
How ORCA Motors Enable Real-Time Response
At the heart of Iris Dynamics' low-latency performance is a design engineered on minimal overhead, deterministic behaviour, and rapid responsiveness to physical events. ORCA motors combine purpose-built hardware with a finely tuned embedded software stack.
Bare-Metal System Architecture
Unlike motors reliant on generic operating systems with unpredictable scheduling, ORCA motors operate on a bare-metal embedded system, free of the latency overhead introduced by complex runtime layers. This architecture is written in proprietary C/C++, and is tailored to the specific performance requirements of real-time actuation. This approach ensures direct and deterministic control over system timing, which is critical for applications requiring precise motion response.
ARM Cortex-M4F with NVIC for Deterministic Interrupt Handling
Iris Dynamics’ technology uses the ARM Cortex-M4F microcontroller, chosen for its balance of computational power and real-time responsiveness. A key feature leveraged is the Nested Vectored Interrupt Controller (NVIC), which allows the system to preempt ongoing tasks to immediately process critical signals, whether from sensors or communication buses [9]. This enables near-instantaneous response to physical events such as force or position changes, while also ensuring predictable timing behaviour, as the NVIC prioritizes interrupts with minimal jitter or delay. Additionally, it supports efficient parallel task handling without the need for multithreading or complex operating system context switching, contributing to the system's overall deterministic performance.
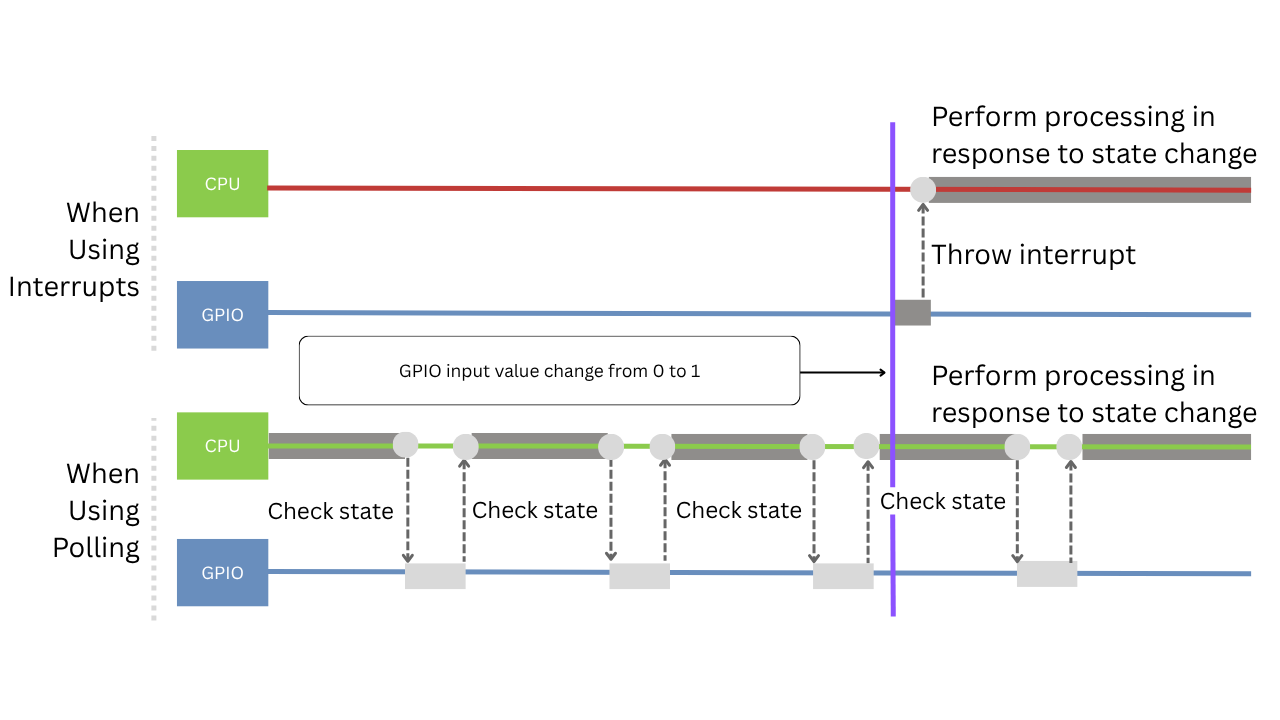
Fig. 2. Comparison of interrupts and polling. When using interrupts, the CPU is automatically notified when a state change occurs. Following a state change, the CPU saves its current state, suspends operation, executes the processing associated with the interrupt, and restores the previous state [10].
Minimal Filtering by Design
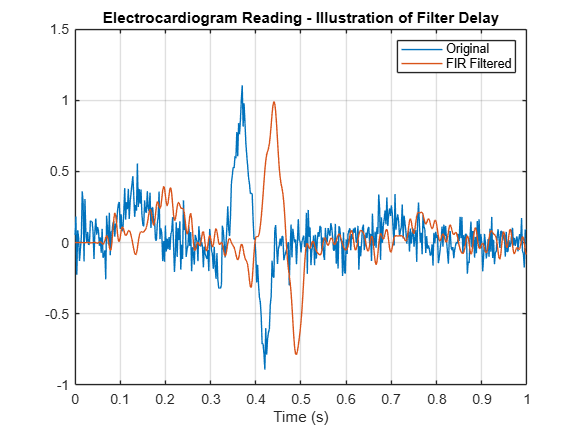
All electronics in the ORCA motor system are engineered to operate with minimal signal filtering. While filtering can help reduce sensor noise, it also introduces signal propagation delays that compound system latency [11]. By minimizing the need for such filtering at both the analog and digital stages, ORCA motors retain more responsiveness, creating tighter control loops and more agile system behaviour.
Fig. 3. Filtering a signal, shown here using a Finite Impulse Response (FIR) filter, introduces signal propagation delays [11].
The Benefits and Challenges of Low-Latency Actuation
The Benefits of a System with Low Latency
The low-latency architecture of the ORCA motors unlocks a level of control and responsiveness that conventional systems struggle to achieve. By operating below human reaction times, with an average response time of 50 microseconds as shown in Figure 4, and tightly closing the feedback loop between sensor input and actuation output, the system supports precise, stable, and predictable motion across a wide range of demanding applications. Low-latency results in rapid response times that enhance motion quality, enable finer control, and improve overall system performance.
Low-latency enables high fidelity the motor’s ability to respond with precision, accuracy, and in real-time. This increased fidelity makes it possible to simulate nuanced physical interactions such as friction effects, virtual dampers, software dead stops, and haptic effects.
![Software enabled dead stop on ORCA motor [GIF]](https://irisdynamics.com/hs-fs/hubfs/deadstop_example.gif?width=720&height=480&name=deadstop_example.gif)
Fig. 4. Software enabled dead stop on an ORCATM Series Smart Linear Motor
With such responsive actuation, users can implement software-defined dead stops that feel physically real, and dynamically modulate damping, in real-time, to simulate varying levels of resistance or inertia. These capabilities are especially valuable in applications like Human-machine Interaction, robotic interfaces, and simulation environments where mechanical feedback must be intuitive and convincing.
By minimizing the total amount of latency present in the system, ORCA motors enable applications that require sub-millisecond response times, opening the door to more immersive, reactive, and safe electromechanical systems.
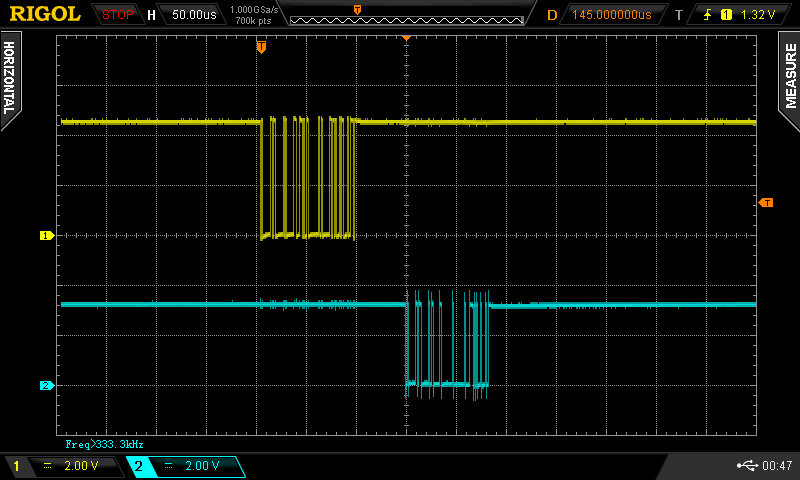
Fig. 5. An oscilloscope capture of the average Modbus response from the ORCA, at a 921,600 baud rate with an interframe delay of 0 microseconds. The yellow trace depicts the incoming request from the Modbus client. The blue trace depicts the response from the ORCA. It takes an average of 50 microseconds from the end of the request to the start of a response, from the ORCA.
The Challenges in Achieving a Low Latency System
Designing an actuation system capable of true real-time response involves more than just fast components. It requires a deep, system-level understanding of both hardware and software, along with the ability to integrate them in ways that avoid typical bottlenecks.
Designing an embedded system to minimize latency, as extensively as possible, involved significant investment in iterative development, testing, and fine-tuning. The process called for careful architectural decisions across the entire signal chain, from sensor acquisition to signal processing, communication protocols, and actuator control. Reaching this level of performance depended on highly specialized knowledge and a multidisciplinary engineering team skilled in electrical design, embedded firmware, and real-time systems.
The result is a system that delivers seamless, low-latency behaviour while hiding the complexity of its underlying architecture. Getting there required time, insight, and sustained engineering effort.
Sample Applications and Industries that Require Low-Latency Actuation
| Automated Manufacturing |
|
In high-throughput manufacturing environments, systems often consist of interconnected components including sensors, actuators, industrial controllers, and communication networks. Latency introduced at any point in the system can accumulate and lead to synchronization errors or inefficient operation [12]. Low-latency actuation helps maintain tight timing control between processes such as material handling, dosing, inspection, and packaging. In one application, low-latency motors enabled a consistent and smooth material dispensing motion, critical for quality control and process repeatability. |
| Robotics & Human-Machine Interaction |
|
In robotics, real-time feedback and actuation are essential for adaptive and responsive behaviour. Robots that interact with changing environments or operate in collaboration with humans must adjust rapidly to new inputs. Low-latency control allows for continuous monitoring and smooth, stable motion in robotic joints or end-effectors. This improves balance, path tracking, and interaction safety. In collaborative robotic systems, the ability to respond within sub-millisecond timeframes contributes to both functional accuracy and user trust [13]. |
| Infrastructure Testing & Simulation |
|
Some applications in infrastructure and equipment testing require precise emulation of complex motion profiles, such as Gaussian waveforms. Accurately reproducing these profiles demands high-resolution control and minimal system delay. With low-latency actuation, systems can dynamically track target motion curves without overshoot or lag, supporting use cases in vibration testing, road simulation, and mechanical validation platforms. |
| Animatronics |
|
In the animatronics industry, creating lifelike and expressive character movements requires fluid precise motion control. Traditional systems often exhibit stiffness or delay that breaks immersion. Low-latency actuation enables seamless synchronization between control inputs and mechanical motion, resulting in smoother transitions, more organic gestures, and increased realism. This is especially important in settings where audience perception is highly sensitive to unnatural movement. |
Latency and Real-Time Response Comparison Between Technologies
ORCA motors an support communication speeds of:
-
Greater than 2 kHz, using something like the IO SmartHub or other embedded Modbus client
-
Up to 1 kHz, when using the orcaSDK, on Windows or Linux, available in C++ and Python
-
Less than approximately 200 Hz, when using a PLC
- Less than approximately 100 Hz, with MATLAB or LabVIEW

Fig. 6. Illustration of the observed message rates, shown in Hz, of the ORCA over Modbus with a variety of software and hardware.
Final Thoughts
Low-latency actuation is essential for systems that require precision, responsiveness, and consistent performance. Achieving real-time response depends on careful integration of hardware, firmware, and communication. ORCA motors are designed to meet these needs by minimizing delay throughout the entire control loop. As demand grows for faster and more reliable systems, low-latency solutions like ORCA will continue to play a key role across a wide range of applications.
.png?width=1100&height=163&name=CTA%20Banners%20for%20Blogs%20(2).png)